

 Ariana
Ariana 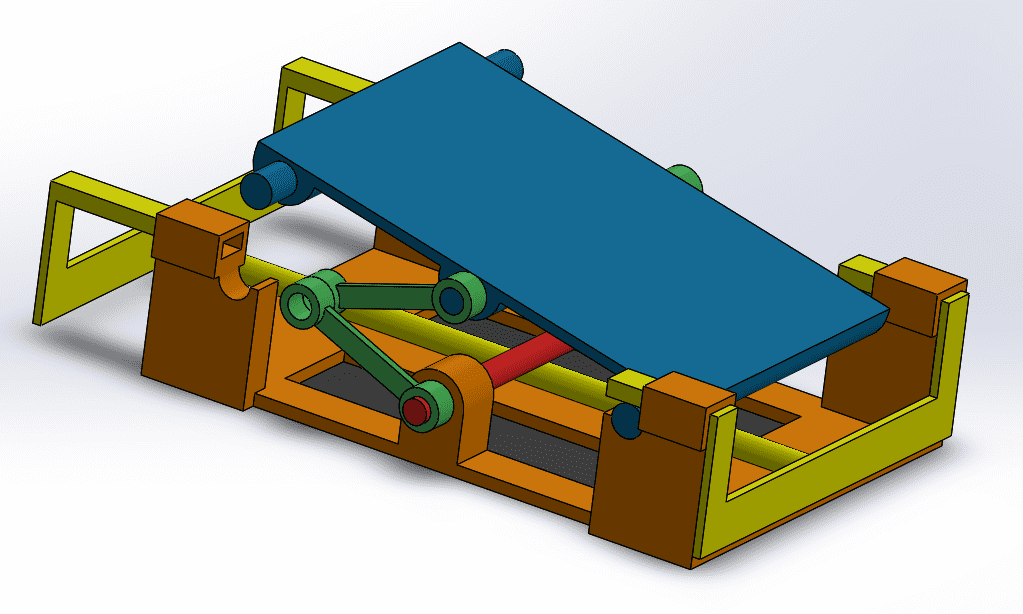
Expériences
freelance solidworks dessinateur
Projet: Table à bascule
J'ai participé activement à la conception, à la modélisation et à l'analyse mécanique d'une table à bascule destinée à des
applications industrielles, notamment dans les domaines de la manutention et de l'assemblage.
* Modélisation détaillée du mécanisme en identifiant les composants clés : châssis, arbre de commande, biellettes, plateau
basculant, cadre avant.
* Réalisation d'une étude cinématique complète incluant schéma minimal, graphe de liaisons, fermeture géométrique, et loi
entrée/sortie.
* Analyse et interprétation des résultats avec courbes de vitesse et d'inclinaison pour valider la performance du système.
* Conception d'un prototype fonctionnel montrant un équilibre précis et une mobilité contrôlée.
Formations
Programmation Conception Mécanique | FREELANCE
j'ai conçu et programmé un robot autonome en utilisant Arduino pour le contrôle des moteurs et des capteurs:
* Programmation de microcontrôleurs Arduino et automate industriel pour la gestion en temps réel des mouvements et
capteurs du prototype.
* Implémentation de routines de contrôle pour optimiser la trajectoire et la stabilité du robot.
